
ADVIS-SR: Real-Time Anomaly Detection for Safe Human–Robot Interaction in real industrial scenario
Published:
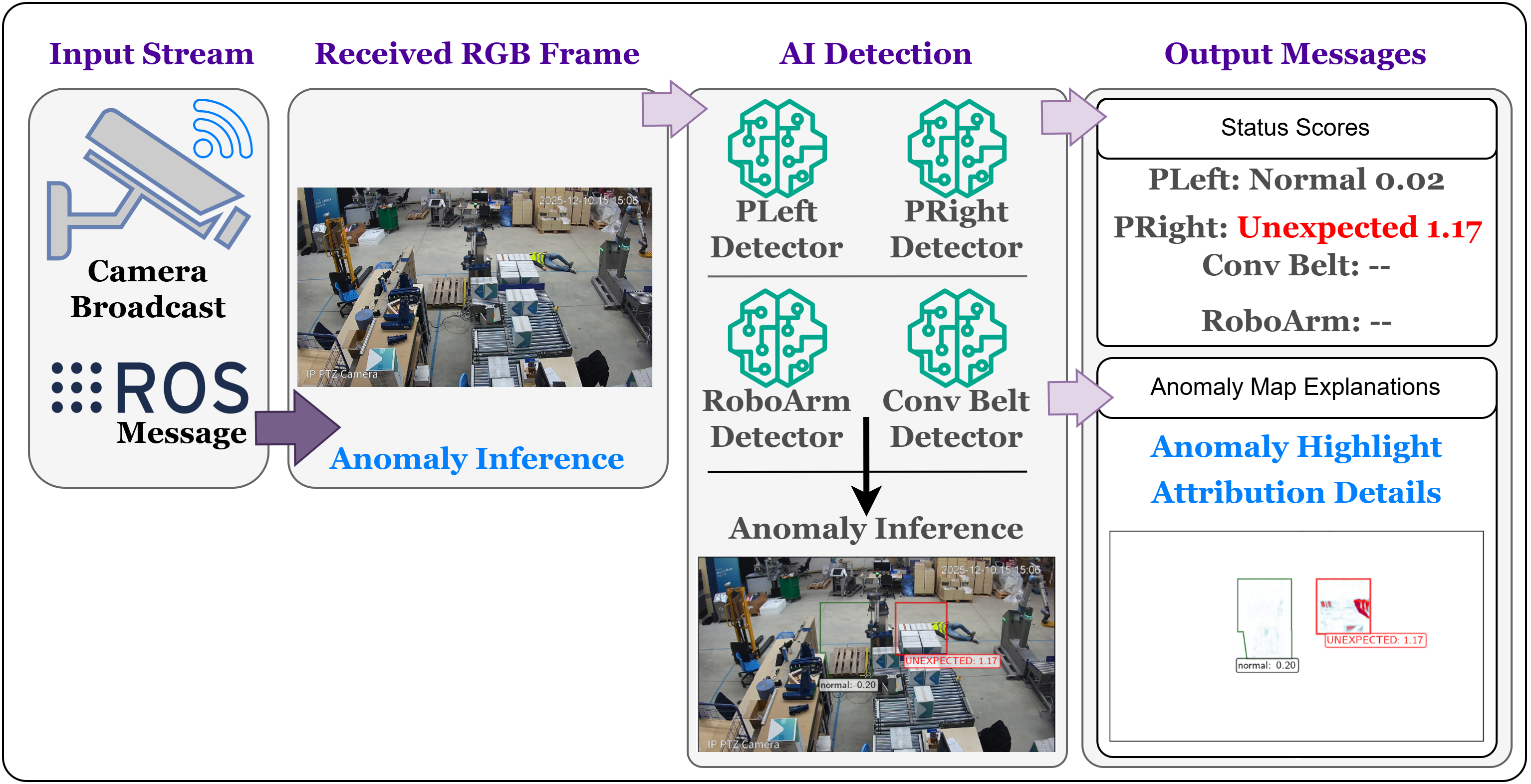
ADVIS-SR is a real-time anomaly detection and visual intelligence system developed for the DistriMuSe Use Case 3 — Safe Interaction with Robots.
Project Summary
The project is built for the activities in use-case of the EU project DistriMuSe focuses on monitoring industrial safety zones in collaborative robotics environments. It uses VAE/VAE-GAN models to learn normal visual patterns and detect unexpected or unsafe conditions through reconstruction-based anomaly scoring.
The system is designed for real-time deployment with:
- ROS2 image streams
- Safety-area-specific models
- Threshold calibration
- GUI-based inference
- RuleX-compatible message publishing
My Contributions
Project Deliverables:
Contributed to deliverables:
- D5.3 Results of the first evaluation and stage 2 feedback:
- Section: Unexpected situations detection and localization by UniTO and RULEX (section 5.1.2.4 of D5.3)
- D3.6 First set of machine learning algorithms:
- D3.5 Privacy-preserving trustworthy ML solutions:
- Section: Building Trustworthiness, Achieving Trustworthiness by Explainability and Explainable AI for Computer Vision with Robotics Focus by using ShapBPT for Robotics.
- Section 2: Achieving Trustworthiness by System Quality Improvement - 2.2.2 Unexpected Condition Detector:
- D4.6 Second release of the reference implementation for the distributed platform
- Section: SW-025 Unexpected Condition Detector - for communication between application and worker nodes.
- D4.5 Updated requirements and design of the distributed platform,design and simulation tools:
- SW-025 - AI-powered anomaly detection system
Safety Areas
| Safety Area | Description |
|---|---|
RoboArm | Robot arm zone |
ConvBelt | Conveyor belt zone |
PLeft | Left personnel safety area |
PRight | Right personnel safety area |
Pipeline
Raw Video / ROS Stream
↓
Frame Extraction + Masking
↓
Safety Area Cropping / Resize
↓
VAE-GAN Training
↓
Threshold Calibration
↓
Live Inference / Alert Publishing
Safety Monitoring Areas
The industrial scene is decomposed into multiple monitored safety zones.
| Safety Area | Description |
|---|---|
| RoboArm | Robotic arm operational zone |
| ConvBelt | Conveyor belt monitoring area |
| PLeft | Left personnel interaction area |
| PRight | Right personnel interaction area |
Each zone is processed independently using dedicated anomaly detection models.
Deep Learning Models
VAE / VAE-GAN Framework
The system uses Variational Autoencoder-based models trained only on normal operating conditions.
During inference:
- Normal patterns are reconstructed correctly
- Unexpected conditions generate larger reconstruction errors
- Reconstruction errors are converted into anomaly scores
Core Components
- Encoder
- Latent representation
- Decoder
- Reconstruction loss
- Adversarial discriminator (VAE-GAN variant)
Threshold Calibration
The framework supports threshold calibration across multiple anomaly scoring strategies.
Features
- Multiple reconstruction-error metrics
- Quantile-based thresholding
- Local neighborhood tolerance
- Area-specific calibration
Supported Analysis
- Threshold sweeping
- Quantile optimization
- Validation-based tuning
Real-Time ROS2 Inference
The system supports live industrial deployment through ROS2.
Supported Features
- ROS2 image subscriptions
- ROS bag replay
- Real-time GUI visualization
- Timeline inspection
- Live anomaly scoring
Example ROS2 Topic
/camera/back_view/image_raw
Explainability and Visualization
The framework supports interpretable inspection of anomaly predictions.
Visual Outputs
- Reconstruction maps
- Difference maps
- Heatmaps
- Timeline visualization
- Safety-area overlays
Goal
Enable engineers and operators to understand:
- why the anomaly was triggered
- where the anomaly occurred
- whether the model decision is trustworthy
GUI-Based Monitoring
The GUI interface supports:
- Real-time visualization
- Detector outputs
- Reconstruction inspection
- Timeline analysis
- Multi-zone monitoring
Performance
Experimental Results
| Metric | Result |
|---|---|
| Accuracy | 99.61% |
| Recall | 95.1% |
| F1-score | 90.9% |
| Real-time Speed | ~12.5 FPS |
Technologies
AI & Vision
- PyTorch
- OpenCV
- NumPy
- torchvision
Robotics & Streaming
- ROS2
- rclpy
- cv_bridge
- sensor_msgs
- Zenoh
Environment & Deployment
- Pixi
- Python
- Linux
- Industrial ROS pipelines
Research Contributions
Main Contributions
- Real-time industrial anomaly detection
- Explainable AI integration
- Area-specific safety monitoring
- Threshold calibration framework
- ROS2 industrial deployment
- Human-centered trustworthy AI
Related Publications
Can I Trust My Anomaly Detection System? A Case Study Based on Explainable AI
ShapBPT in Perspective: A Consolidated Review and an eXplainable Anomaly Detection Case Study
ShapBPT: Image Feature Attributions using Data-Aware Binary Partition Trees
Open Source
The full project implementation is publicly available on GitHub.
Future Directions
Potential future improvements include:
- Vision-Language integration
- Multimodal anomaly detection
- Explainable robotics systems
- Edge-AI deployment
- Foundation models for industrial monitoring
- Human feedback integration
Citation
@misc{rashid2026advis,
title={ADVIS-DistriMuSe-SR: Real-Time Anomaly Detection for Safe Human-Robot Interaction},
author={Rashid, Muhammad, Amparore, Elvio},
year={2026},
howpublished={GitHub Repository},
url={https://github.com/rashidrao-pk/advis_distrimuse_unito_SR}
}