Image-Stitching-using-SIFT-features-for-Panorama-Creation-in-Matlab
Image-Stitching-using-SIFT-features-for-Panorama-Creation-in-Matlab
Image Stitching using SIFT features for Panorama Creation in Matlab
Image Stitching Based on Affine and Homography
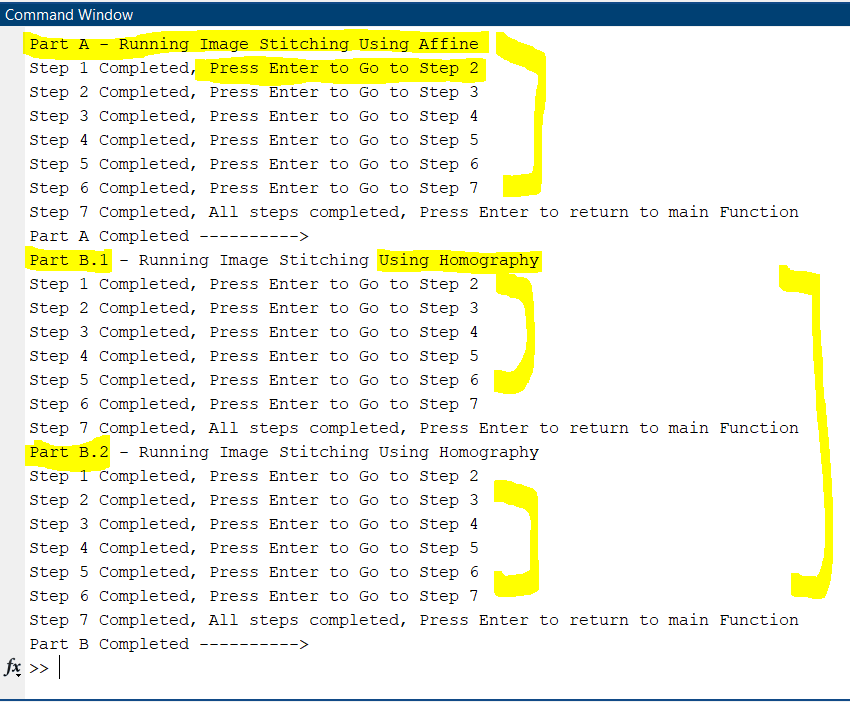
Part A:
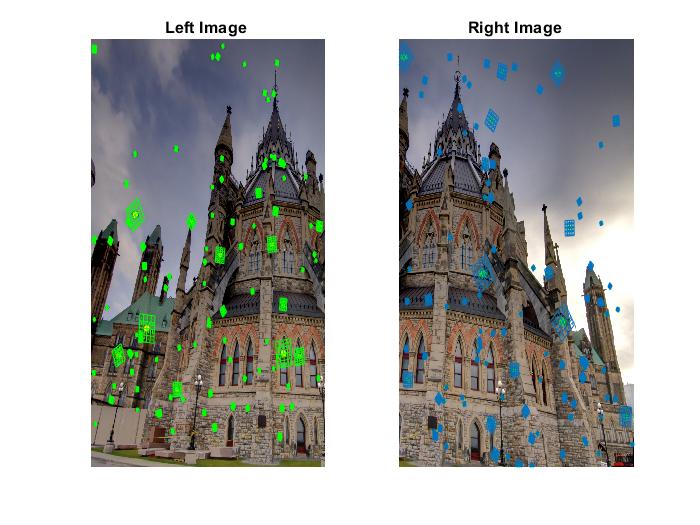
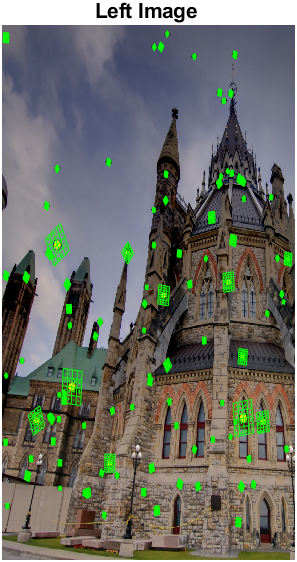
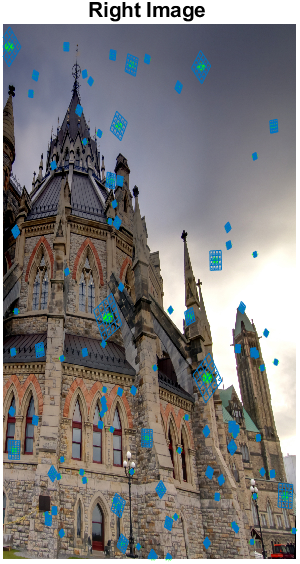
In part A, two images parliament-left and parliament-right are being stitched.
- Step1: Preprocessing
1.1. Conversion to Single
1.2. Gray Conversion - Step2: Detect keypoints and extract descriptors
2.1. Frames and descriptors will be extracted Using vl_sift function from vl_feat library.
2.2. They are plotted using vl_plotframe
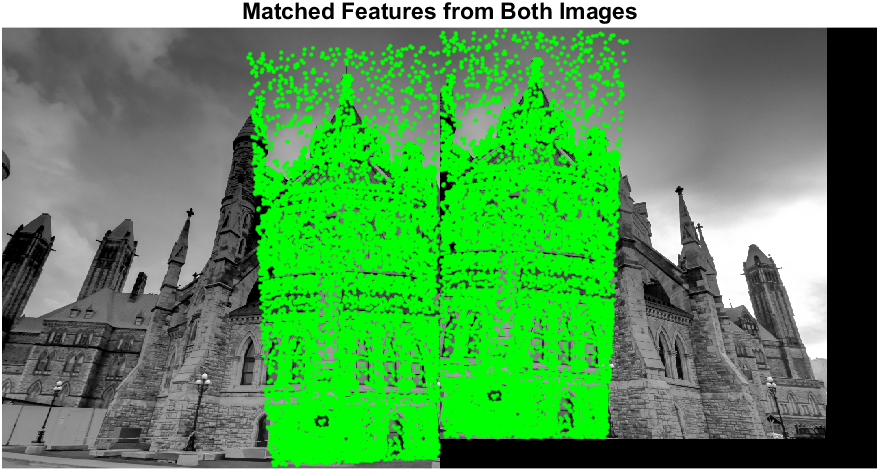
2.3. Descriptors are plotted using vl_plotsiftdescriptor.m - Step3: Match Features
3.1. Extracted Descriptors are matched using vl_ubcmatch.m - Step4: Prune features
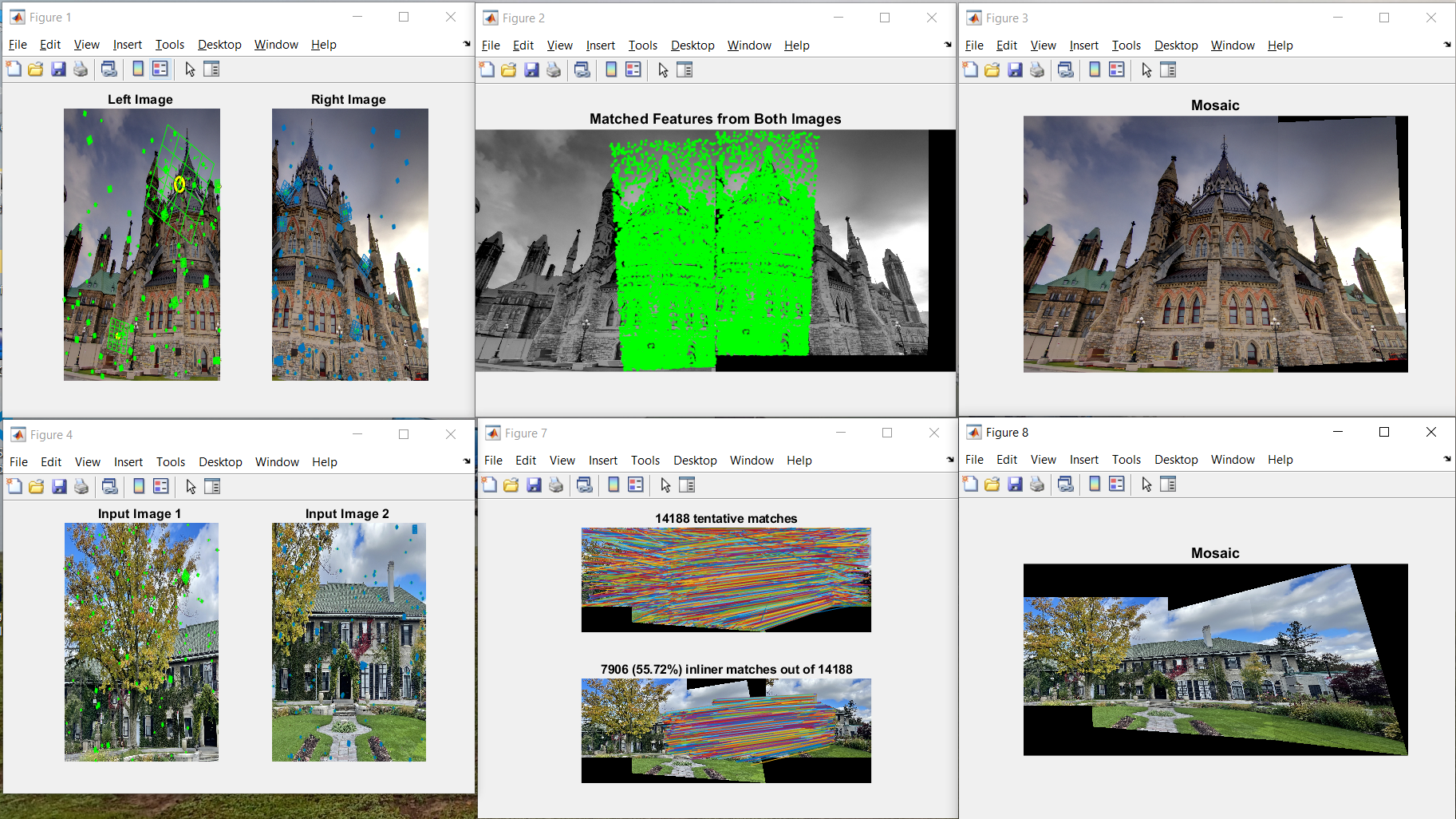
4.1. Select the closest matches based on the matrix of pairwise descriptor distances - Step5: Robust Transformation Estimation
5.1. Affine Transformation and inliers are calculated using ransacfitaffine.m
5.2. Transformation Plotting using fun_plotmatches.m
5.3. Outliers are also calculated - Step6: Compute Optimal Transformation
- Step7: Create panorama
7.1. Panorama is created using above data and passed to vl_imwbackward.m
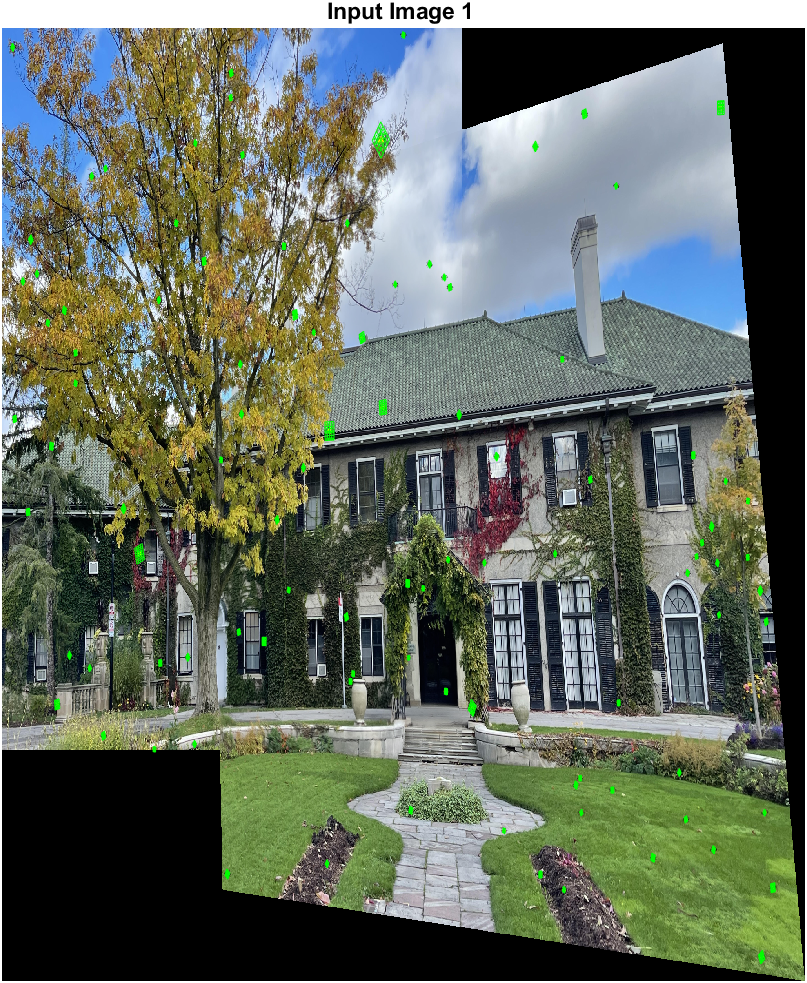
Part B:
In part B, two images Glendon-Hall-left, Glendon-Hall-middle and Glendon-Hall-right are being stitched.
- Step1: Preprocessing
1.1. Conversion to Single
1.2. Gray Conversion - Step2: Detect keypoints and extract descriptors
2.1. Frames and descriptors will be extracted Using vl_sift function from vl_feat library.
2.2. They are plotted using vl_plotframe
2.3. Descriptors are plotted using vl_plotsiftdescriptor.m - Step3: Match Features
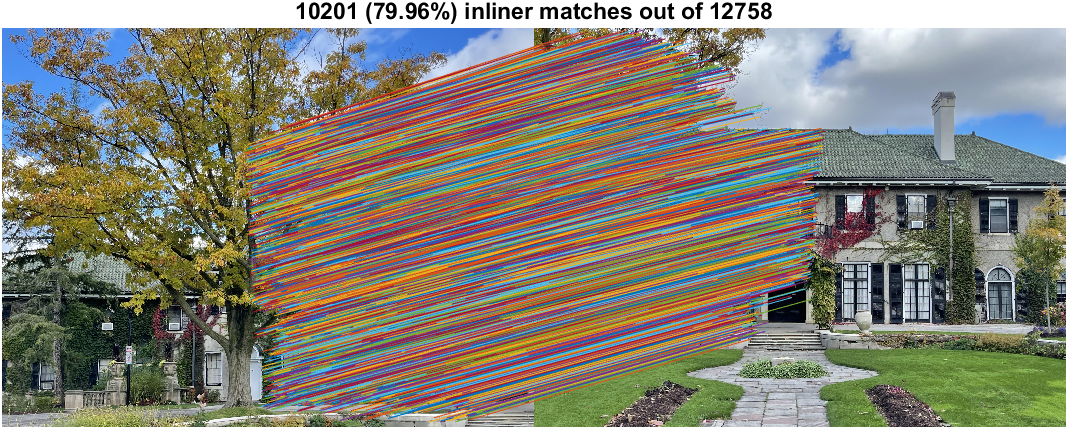
3.1. Extracted Descriptors are matched using vl_ubcmatch.m - Step4: Prune features
4.1. Select the closest matches based on the matrix of pairwise descriptor distances - Step5: Robust Transformation Estimation
5.1. vl_colsubset is used for homography estimation.
5.2. Kronecker tensor and VL_HAT Hat operator are also used.
5.3. Svd is calculated.
5.4. Hence score homography is calculated. - Step6: Compute Optimal Transformation
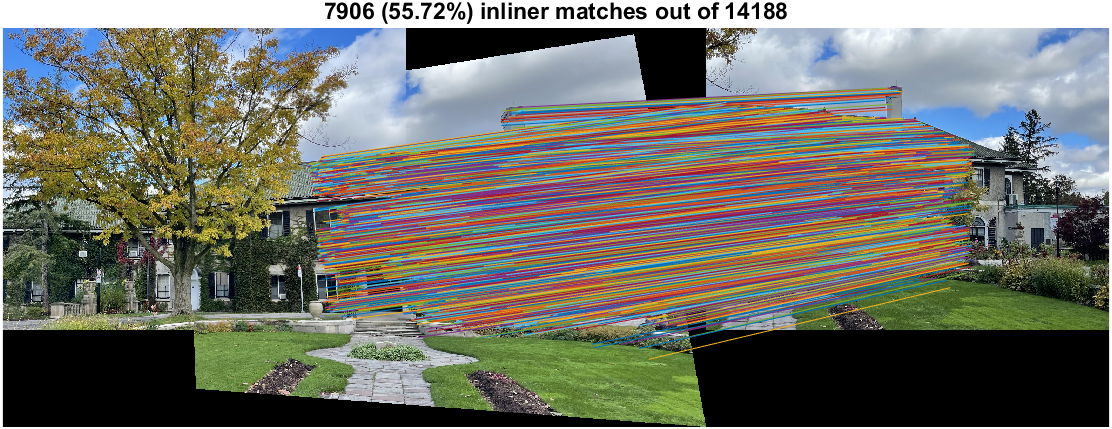
6.1. Max Score is selected from homography score.
6.2. Homography based points are then plotted. - Step7: Create panorama
7.1. Panorama is created using above data and passed to vl_imwbackward.m